Az önvezetés megvalósításához ráadásul ezen érzékelő rendszerek száma és teljesítménye, illetve az ezek által gyűjtött adatok valós idejű feldolgozására alkalmas számítógépek is tovább kell, hogy fejlődjenek a mai technológiai szinthez képest.
Manapság már meg sem lepődünk azon a kijelentésen, hogy az autók és a közlekedés pár éven belül gyökeresen meg fog változni, ugyanis ez már egyfajta ténynek számít. Azonban arról még mindig igen keveset tudunk, hogy miért, és hogyan fognak működni a jövőben az egyes „automatizált” vagy éppen ”intelligens” folyamatok. A Continental mérnökei többek között azon is dolgoznak, hogy a járművekben az önvezető funkciónak köszönhetően az emberi aktivitás kiiktatható legyen a vezetésből, aminek köszönhetően a sofőr rengeteg hasznos időt nyerhet, amíg elér A pontból B-be. Természetesen mindezt úgy, hogy eleget tesz elsődleges küldetésének, ami a biztonság megteremtése és az emberi élet védelme.
A Continental az USA-ban, egészen pontosan a kaliforniai Carpinteriában fejleszti azokat a rendkívül érzékeny szenzorokat, amelyek nemhogy pótolni fogják a vezető látását, hanem a tervek szerint annál sokkal élesebb is lesz az általuk alkotott kép. A forradalminak számító 3D Flash LiDAR már a piaci bevezetése előtt sikerrel mutatkozott be a világ nagy szakkiállításain, és a tervek szerint a berendezést pár éven belül már autókba fogják szerelni.
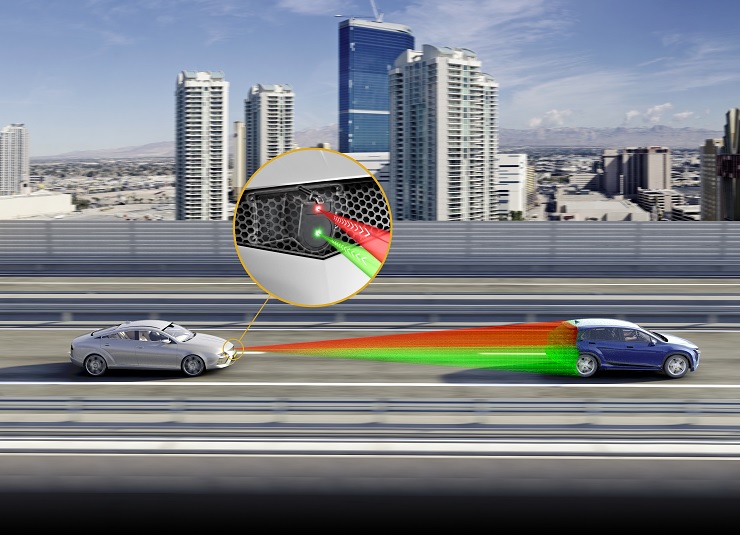
A LiDAR (Light Detection And Ranging) a hagyományos radar elve szerint működik, azzal a nagy különbséggel, hogy az eddig használt rádióhullámok helyett lézerrel térképezi fel a környező világot. Ennek a megoldásnak az az előnye, hogy valós időben képes részletes képet alkotni a jármű teljes környezetéről, vagyis az útról, a járókelőkről, a többi járműről, és a közelben lévő más tárgyakról. Nem nehéz elképzelni, hogy ez, a lézer segítségével összeálló számítógépes kép sokkal pontosabb és részletesebb, mint amit az emberi szem és agy valaha képes alkotni.

A 3D Flash LiDAR-t hamarosan a Continental vezető nélküli mobilitási rendszerekhez kínált technológiáinak CUbE nevű fejlesztési platformján fogják tesztelni. A kísérletek jelenleg ott tartanak, hogy a berendezés radarral és sorba kapcsolt kamerákkal érzékeli a környezetet, de hamarosan eljutnak arra a szintre a fejlesztők, hogy lézer alapú szenzorokkal egészíthetik ki a technológiát.

A fejlesztés egyik legnagyobb előnye, hogy valós időben kombinálja a képfelismerést a környezetérzékeléssel. Így az eddigieknél sokkal átfogóbb, és részletesebb képet lehet alkotni a jármű teljes környezetéről, függetlenül attól, hogy nappal van vagy éjszaka, így remélhetőleg pár éven belül értelmét veszti az a ma még megszívlelendő jó tanács, hogy mindig a látási viszonyoknak megfelelően vezessünk.































